|
���x��һ������Ƭ�������Ⱥ͌����ٶ�ͬ����Ҫ�����C����Ҫ�߂�����أ�߀���߂����M�Č���ϵ�y��С��4C����SONY IMX258ģ�M���@�wIMX214������ģ�M������V�ܺ��u��1300�f���صȳ�������ԣ�... ������һ������Ƭ�������Ⱥ͌����ٶ�ͬ����Ҫ�����C����Ҫ�߂�����أ�߀���߂����M�Č���ϵ�y��С��4C����SONY IMX258ģ�M���@�wIMX214������ģ�M������V�ܺ��u��1300�f���صȳ�������ԣ���������PDAF��λ�������g���Ɍ��F���_0.1���˲�g�����������һ����ISPӰ��̎������ʹ�ÈD����څ������  ������λ����(PDAF)��Phase Detection Auto Focu�ĺ��Q������λ�Ԅәz�y�Ԅӌ������@헼��g�����C�I������ʮ�ֳ��죬�������֙C�I����^�¿Ƽ�����ô��λ�����͂��y������ʲô������? ���������ԭ�� �������y���֙C�z���^���䌦�����õ��Ƿ���ʽ����ϵ�y����ԭ���Ǹ������c̎����Č��ȶ�׃�������Ҍ��ȶ����r���R�^λ�ã�Ҳ���ǜʴ_������λ�á� ���������^�̣� ����1.δ�Ͻ���B�£�����������c�Į���̎��̓����B; ����2.�_ʼ�������R�^�_ʼ�Ƅӣ�������u���������ȶ��_ʼ����; ����3.�Ͻ���B�����������������ȶ���ߣ����֙C����֪�������ԕ��^�m�Ƅ��R�^; ����4.�^�m�Ƅ��R�^�l�F���ȶ��_ʼ�½����Mһ���Ƅ��R�^���l�F���ȶ��Mһ���½����֙C֪���ѽ��e�^���c; ����5.�R�^���������ȶ���ߵ�λ�ã���Ɍ����� ������λ����ԭ�� ������λ�z�yʽ����ϵ�y�džη����C�Ϸdz��ռ���һ�N������ʽ�������c�nj����ٶȿ죬ץ�Ļ��Ĕz�Ƅ����w�r����ʧ������λ�z�y����ϵ�y�����õĈD����������c��һ�ӣ��й�^���еIJ��������c�����������@Щ���ر��Q���ڱ�����(Masked Pixels)���dzɌ�ʹ�õġ�����֮�g�ľ��x���Y������������׃�����Ϳ��Ԏ���ϵ�y�Q���R�^������Ҫ��ʴ_�������ƄӶ��h�� 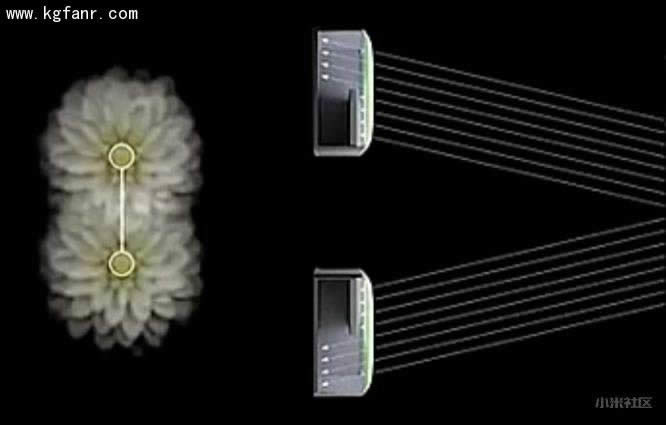 ������λ�����c������ą^�e ����1.�������Ҫ�R�^�����ďĺ����ǰ����һ�飬·���^�h;����λ����ֻ��Ҫ��һ�Ɏ��D��Ϳ����Д���R�^��ԓ��ǰ��߀��������ܡ��p���R�^�Д��r�g�� ����2.�������·�^�Ͻ�λ�Õr��Ҫ���^�m��һ�Σ��г̌��Ⱥ���ܰl�F�ʹ_���Ͻ��c��Ȼ����֪ͨ�R�^���غϽ��c;����λ�����ڵ��_�Ͻ��c�r�����R�ϴ_���Ͻ��c��֪ͨ�R�^ֹͣ���p�����R�^���صĕr�g�� 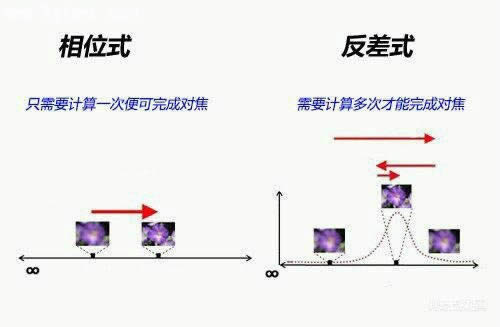 ���������λ�����c�������ȣ������ٶ����@�졣 ����С��4C���Ęӏ�    |
��ܰ��ʾ��ϲ�g��վ��Ԓ��Ո�ղ�һ�±�վ��
��վ�l����Win7������ϵ�y��Win10�������XP������ϵ�y�H�邀�ˌW���yԇʹ�ã�Ո�����d��24С�r�Ȅh�������������κ��̘I��;����t�����ؓ��Ո֧��ُ�Iܛ����ܛ����
��վ�����YԴȫ�������ھW�j�YԴ,���ַ������ę���,Ո���r֪ͨ�҂�(peng896066052@126.com),�҂������r̎��.
Copyright © 2018-2020 ����ľ�L���dվ

